一種偏癱患者手功能康復機器人的制作方法
本發明涉及康復設備,具體為一種偏癱患者手功能康復機器人。
背景技術:
1、腦卒中僅次于惡性腫瘤和心血管疾病,是西方工業化國家的第三大致死疾病。幸存者中多數留有不同程度的肢體運動障礙、認知障礙等后遺癥,缺血性腦卒中患者臨床上以偏癱為主要后遺癥,在偏癱的康復中,又以手指功能的康復最為困難。目前手指功能的裝置對于驅動手指的彎曲,并且對食指、中指、無名指和小拇指的訓練是尤為必要,目前這種彎曲方式往往會采用剛性的連接方式進行連接,并采用電機、氣缸等方式驅動手指進行彎曲,從而來對手指功能進行康復。但是目前該種驅動方式需要采用大量電機和氣缸,導致整個裝置結構復雜,且不便用戶操作。
技術實現思路
1、(一)解決的技術問題
2、針對現有技術的不足,本發明提供了一種偏癱患者手功能康復機器人,解決了上述背景技術中提出的問題。
3、(二)技術方案
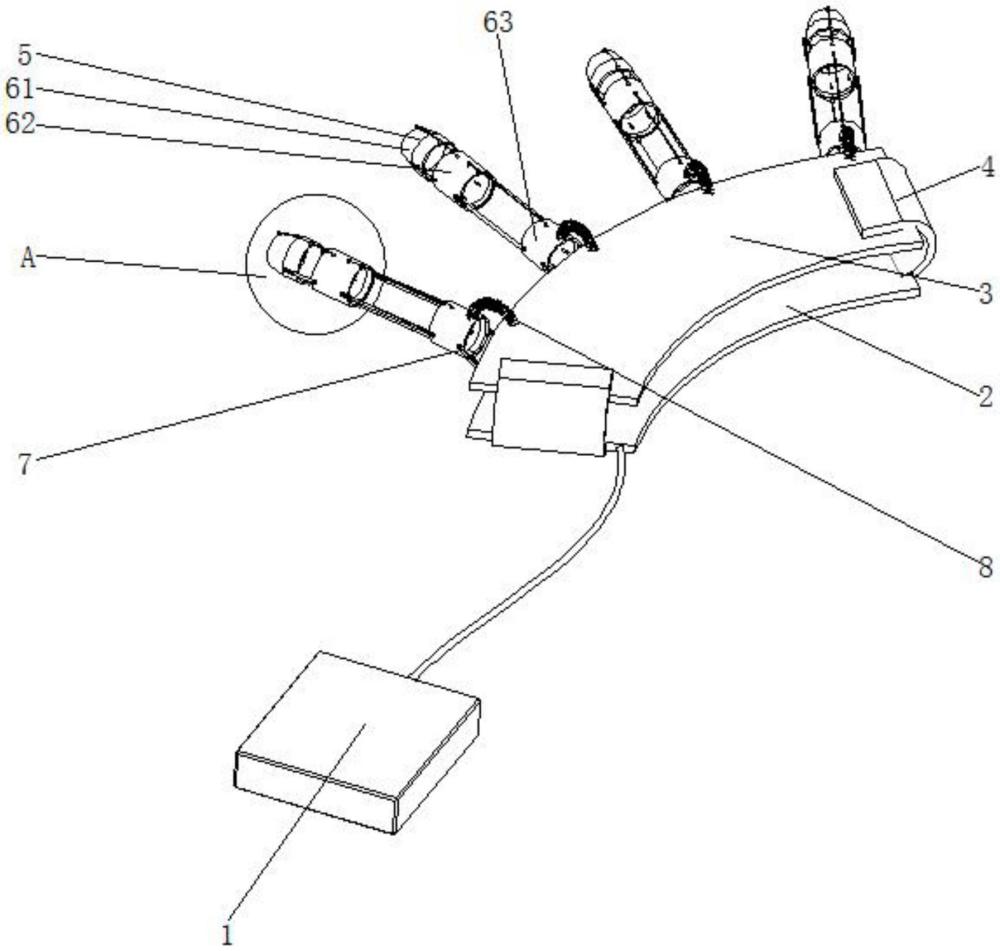
4、為實現以上目的,本發明通過以下技術方案予以實現:一種偏癱患者手功能康復機器人,包括固定板一、固定板二、若干個彎曲機構和控制器,所述固定板一位于固定板二下方,并與固定板二相連,若干個彎曲機構沿固定板一的圓周方向分布在固定板一和固定板二之間,并與固定板一和固定板二相連,所述彎曲機構包括關節套一、關節套二、關節套三、彈簧、拉動組件一、拉動組件二、拉動組件三,兩根連桿和若干根滑動桿,所述關節套一、關節套二和關節套三相對于固定板一由遠至近依次布置在固定板一和固定板二之間,且處于同一條直線上,所述關節套三的左右兩側通過連桿鉸接在固定板一上,所述彈簧的一端與固定板二相連,另一端與關節套三頂部相連,所述拉動組件三設置在固定板的底部,用于拉動關節套三向下轉動,所述關節套一的左右兩側通過滑動桿與關節套二鉸接,所述關節套二的左右兩側通過滑動桿與關節套三鉸接,所述拉動組件一設置在關節套二上,用于拉動關節套一上下轉動,所述拉動組件二設置在關節套三上,用于拉動關節套二上下轉動,所述控制器與拉動組件一、拉動組件二和拉動組件三相連。
5、優選的,所述拉動組件一包括兩個拉動部件一,兩個拉動部件一分別布置在關節套二的上下兩側,所述拉動部件一包括繩索一、固線塊一、齒輪一、收緊輪一和齒條一,所述固線塊一分別設置在關節套一的上下兩側,所述關節套二的上下兩側分別開設有沿關節套二長度方向的卡槽一,所述收緊輪一分別樞接在卡槽一內,所述繩索一一端與固線塊一相連,另一端與收緊輪一相連,所述齒輪一與收緊輪一相連,所述齒條一滑動適配在卡槽一中,并與齒輪一相互嚙合,所述齒條一與卡槽一之間通過記憶彈簧一相連,所述卡槽一內設置加熱板一和冷凝板一,所述加熱板一和冷凝板一均位于遠離收緊輪一的一側。
6、優選的,所述拉動組件二包括兩個拉動部件二,兩個拉動部件二分別布置在關節套三的上下兩側,所述拉動部件二包括繩索二、固線塊二、齒輪二、收緊輪二和齒條二,所述固線塊二分別設置在關節套二的上下兩側,所述關節套三的上下兩側分別開設有沿關節套三長度方向的卡槽二,所述收緊輪二分別樞接在卡槽二內,所述繩索二一端與固線塊二相連,另一端與收緊輪二相連,所述齒輪二與收緊輪二相連,所述齒條二滑動適配在卡槽二中,并與齒輪二相互嚙合,所述齒條二與卡槽二之間通過記憶彈簧二相連,所述卡槽二內設置加熱板二和冷凝板二,所述加熱板二和冷凝板二均位于遠離收緊輪二的一側。
7、優選的,所述拉動組件三包括繩索三、固線塊三、齒輪三、收緊輪三和齒條三,所述固線塊三設置在關節套三的下側,所述固定板一的底部開設有沿固定板一長度方向的卡槽三,所述收緊輪三分別樞接在卡槽三內,所述繩索三一端與固線塊三相連,另一端與收緊輪三相連,所述齒輪三與收緊輪三相連,所述齒條三滑動適配在卡槽三中,并與齒輪三相互嚙合,所述齒條三與卡槽三之間通過記憶彈簧三相連,所述卡槽三內設置加熱板三和冷凝板三,所述加熱板三和冷凝板三均位于遠離收緊輪三的一側。
8、優選的,所述記憶彈簧一、記憶彈簧二和記憶彈簧三由鎳-鈦記憶合金制作。
9、優選的,所述關節套一和關節套二的左右兩側均設置有卡柱,位于關節套一和關節套二之間的滑動桿一端鉸接在關節套二上,遠離關節套二的一端上開設有沿滑動桿長度方向的卡槽四,所述卡槽四內沿卡槽四的長度方向開設有與卡柱相對應若干個定位槽,位于關節套二和關節套三之間的滑動桿一端鉸接在關節套三上,遠離關節套三的一端開設有沿滑動桿長度方向的卡槽四,所述卡槽四內沿卡槽四的長度方向開設有沿卡槽四長度方向與卡柱相互對應的若干個定位槽。
10、優選的,關節套二和關節套三內均設置有沿圓周方向的若干根加熱絲,所述加熱絲與控制器相連。
11、優選的,關節套二和關節套三內前后均設置有氣囊,所述氣囊內填充有乙醚。
12、優選的,固定板一和固定板二之間通過魔術貼相連,所述魔術貼的一端與固定板一的兩側相連,另一端粘貼在固定板二上。
13、(三)有益效果
14、本發明提供了一種偏癱患者手功能康復機器人。具備以下有益效果:
15、1、該偏癱患者手功能康復機器人,該裝置通過將關節套一、關節套二和關節套三分別套設在患者的手指的各個關節上,通過拉動組件一、拉動組件二和拉動組件三來使得患者手指的各個關節進行上下轉動,從而是實現對患者手功能的一個康復運動。改變傳統方式中采用電機或氣缸等驅動方式,結構更加巧妙。
技術特征:
1.一種偏癱患者手功能康復機器人,其特征在于:包括固定板一(2)、固定板二(3)、若干個彎曲機構(5)和控制器(1),所述固定板一(2)位于固定板二(3)下方,并與固定板二(3)相連,若干個彎曲機構(5)沿固定板一(2)的圓周方向分布在固定板一(2)和固定板二(3)之間,并與固定板一(2)和固定板二(3)相連,所述彎曲機構(5)包括關節套一(61)、關節套二(62)、關節套三(63)、彈簧(8)、拉動組件一(9)、拉動組件二(14)、拉動組件三(15),兩根連桿(7)和若干根滑動桿(10),所述關節套一(61)、關節套二(62)和關節套三(63)相對于固定板一(2)由遠至近依次布置在固定板一(2)和固定板二(3)之間,且處于同一條直線上,所述關節套三(63)的左右兩側通過連桿(7)鉸接在固定板一(2)上,所述彈簧(8)的一端與固定板二(3)相連,另一端與關節套三(63)頂部相連,所述拉動組件三(15)設置在固定板一(2)的底部,用于拉動關節套三(63)向下轉動,所述關節套一(61)的左右兩側通過滑動桿(10)與關節套二(62)鉸接,所述關節套二(62)的左右兩側通過滑動桿(10)與關節套三(63)鉸接,所述拉動組件一(9)設置在關節套二(62)上,用于拉動關節套一(61)上下轉動,所述拉動組件二(14)設置在關節套三(63)上,用于拉動關節套二(62)上下轉動,所述控制器(1)與拉動組件一(9)、拉動組件二(14)和拉動組件三(15)相連。
2.根據權利要求1所述的一種偏癱患者手功能康復機器人,其特征在于:所述拉動組件一(9)包括兩個拉動部件一,兩個拉動部件一分別布置在關節套二(62)的上下兩側,所述拉動部件一包括繩索一(91)、固線塊一(93)、齒輪一(99)、收緊輪一(98)和齒條一(90),所述固線塊一(93)分別設置在關節套一(61)的上下兩側,所述關節套二(62)的上下兩側分別開設有沿關節套二(62)長度方向的卡槽一(94),所述收緊輪一(98)分別樞接在卡槽一(94)內,所述繩索一(91)一端與固線塊一(93)相連,另一端與收緊輪一(98)相連,所述齒輪一(99)與收緊輪一(98)相連,所述齒條一(90)滑動適配在卡槽一(94)中,并與齒輪一(99)相互嚙合,所述齒條一(90)與卡槽一(94)之間通過記憶彈簧一(97)相連,所述卡槽一(94)內設置加熱板一(95)和冷凝板一(96),所述加熱板一(95)和冷凝板一(96)均位于遠離收緊輪一(98)的一側。
3.根據權利要求1所述的一種偏癱患者手功能康復機器人,其特征在于:所述拉動組件二(14)包括兩個拉動部件二,兩個拉動部件二分別布置在關節套三(63)的上下兩側,所述拉動部件二包括繩索二(141)、固線塊二(143)、齒輪二(149)、收緊輪二(148)和齒條二(140),所述固線塊二(143)分別設置在關節套二(62)的上下兩側,所述關節套三(63)的上下兩側分別開設有沿關節套三(63)長度方向的卡槽二(144),所述收緊輪二(148)分別樞接在卡槽二(144)內,所述繩索二(141)一端與固線塊二(143)相連,另一端與收緊輪二(148)相連,所述齒輪二(149)與收緊輪二(148)相連,所述齒條二(140)滑動適配在卡槽二(144)中,并與齒輪二(149)相互嚙合,所述齒條二(140)與卡槽二(144)之間通過記憶彈簧二(147)相連,所述卡槽二(144)內設置加熱板二(145)和冷凝板二(146),所述加熱板二(145)和冷凝板二(146)均位于遠離收緊輪二(148)的一側。
4.根據權利要求1所述的一種偏癱患者手功能康復機器人,其特征在于:所述拉動組件三(15)包括繩索三(151)、固線塊三(153)、齒輪三(159)、收緊輪三(158)和齒條三(150),所述固線塊三(153)設置在關節套三(63)的下側,所述固定板一(2)的底部開設有沿固定板一(2)長度方向的卡槽三(154),所述收緊輪三(158)分別樞接在卡槽三(154)內,所述繩索三(151)一端與固線塊三(153)相連,另一端與收緊輪三(158)相連,所述齒輪三(159)與收緊輪三(158)相連,所述齒條三(150)滑動適配在卡槽三(154)中,并與齒輪三(159)相互嚙合,所述齒條三(150)與卡槽三(154)之間通過記憶彈簧三(157)相連,所述卡槽三(154)內設置加熱板三(155)和冷凝板三(156),所述加熱板三(155)和冷凝板三(156)均位于遠離收緊輪三(158)的一側。
5.根據權利要求2至4任一一項所述的一種偏癱患者手功能康復機器人,其特征在于:所述記憶彈簧一(97)、記憶彈簧二(147)和記憶彈簧三(157)由鎳-鈦記憶合金制作。
6.根據權利要求1所述的一種偏癱患者手功能康復機器人,其特征在于:所述關節套一(61)和關節套二(62)的左右兩側均設置有卡柱(11),位于關節套一(61)和關節套二(62)之間的滑動桿(10)一端鉸接在關節套二(62)上,遠離關節套二(62)的一端上開設有沿滑動桿(10)長度方向的卡槽四(101),所述卡槽四(101)內沿卡槽四(101)的長度方向開設有與卡柱(11)相對應若干個定位槽(102),位于關節套二(62)和關節套三(63)之間的滑動桿(10)一端鉸接在關節套三(63)上,遠離關節套三(63)的一端開設有沿滑動桿(10)長度方向的卡槽四(101),所述卡槽四(101)內沿卡槽四(101)的長度方向開設有沿卡槽四(101)長度方向與卡柱(11)相互對應的若干個定位槽(102)。
7.根據權利要求1所述的一種偏癱患者手功能康復機器人,其特征在于:所述關節套二(62)和關節套三(63)內均設置有沿圓周方向的若干根加熱絲(12),所述加熱絲(12)與控制器(1)相連。
8.根據權利要求7所述的一種偏癱患者手功能康復機器人,其特征在于:所述關節套二(62)和關節套三(63)內前后均設置有氣囊(13),所述氣囊(13)內填充有乙醚。
9.根據權利要求1所述的一種偏癱患者手功能康復機器人,其特征在于:所述固定板一(2)和固定板二(3)之間通過魔術貼(4)相連,所述魔術貼(4)的一端與固定板一(2)的兩側相連,另一端粘貼在固定板二(3)上。
技術總結
本發明提供一種偏癱患者手功能康復機器人,涉及康復設備領域,包括固定板一、固定板二、若干個彎曲機構和控制器,固定板一位于固定板二下方,并與固定板二相連,若干個彎曲機構沿固定板一的圓周方向分布在固定板一和固定板二之間,并與固定板一和固定板二相連,彎曲機構用于帶動用戶的各個手指進行一個彎曲運動,從而達到一個康復效果。該裝置改變了傳統的電機、氣缸的驅動方式,使得驅動方式更加快速且更加巧妙。
技術研發人員:謝建美,鐘菊英,王鈴鈴,張知先,許方潔
受保護的技術使用者:紹興市人民醫院
技術研發日:
技術公布日:2024/10/14
- 還沒有人留言評論。精彩留言會獲得點贊!