套管適配器、患者手術平臺及手術機器人的制作方法
本申請涉及醫療器械領域,尤其涉及一種套管適配器、患者手術平臺及手術機器人。
背景技術:
1、手術機器人系統能夠輔助醫生進行微創外科手術,具有手術創口小、出血量低、手術操作精確、病患恢復快等優點。手術機器人系統包括供醫生發出指令的主控制端、設置在從操縱端的多條機械臂、搭載于機械臂上的器械組件。醫生通過主控制端控制機械臂與器械組件動作,以完成不同手術體位下的切除、縫合等操作。
2、在手術前,需要使用套管在病患腹腔上開口并建立通道,套管通過手術機器人機械臂上安裝的套管適配器固定在機械臂上。由于手術器械、攝像頭等工具均經由穿刺套管進入人體,手術過程中必須保證套管和這些手術器械的穩定,因此要求套管與套管適配器的連接必須非常可靠,同時由于每次手術后得需要對套管進行消毒,因此要求套管與套管適配器能夠實現快速安裝或拆卸。
3、對此,公告號為cn106102642b的中國專利公開了一種外科手術套管適配器及相關的系統和方法,包括:主體,所述主體具有接收套管的一部分的孔口;可樞轉的夾緊臂,所述可樞轉的夾緊臂接合被接收在孔口內的所述套管的部分;夾緊臂包括凸輪從動件表面;在第一位置和第二位置之間可移動的塊,所述塊包括凸輪表面。所述塊的凸輪表面可以在第一位置接合夾緊臂的凸輪從動件表面,以將夾緊臂致動到閉合位置,在所述閉合位置,夾緊臂接合被接收在孔口中的所述套管的部分,當所述塊在第二位置時,夾緊臂可以被允許移動到打開位置,在所述打開位置,夾緊臂不接合套管。
4、該專利方案通過手柄帶動滑塊運動,通過滑塊與夾持臂的配合,利用滑動凸輪結構的滑動運動來實現鎖舌的開合,從而使套管被夾緊,在長期使用過程中由于摩擦會發生磨損,導致鎖緊力降低、可靠性變差。而且,由于上述滑動機構的滑動摩擦力大,且壓簧的彈力方向與作用到夾爪上的力方向之間不是平行的,對于使夾爪鎖緊的壓簧的彈力要求高,間接造成了占用空間的增大或者彈簧選型成本的增加,而且由于壓簧彈力大,操作者解鎖時會比較費力。此外,該方案的套管具有附接部分,導致套管重量較重且重心不在套管中心線上,導致使用感受不佳;而且附接部分的凹陷和夾爪的尖端的配合,加工精度要求高,否則緊密性達不到要求。
5、故而,針對目前現有技術中采用的技術方案來說,在結構長期使用的可靠性、操作舒適度以及制造成本等方面還有待進一步優化。
技術實現思路
1、本申請的目的之一是提供一種套管適配器,以解決長期使用的可靠性、操作舒適度以及制造成本高的問題。
2、為了達到上述的目的,本申請的套管適配器包括:活動組件、相互配合的上蓋和下蓋、以及位于上蓋頂端的接口,所述活動組件用于對接套管以實現所述套管的夾緊與松開,所述上蓋和所述下蓋用于承載所述活動組件和所述接口,所述接口用于將該套管適配器安裝于機械臂。
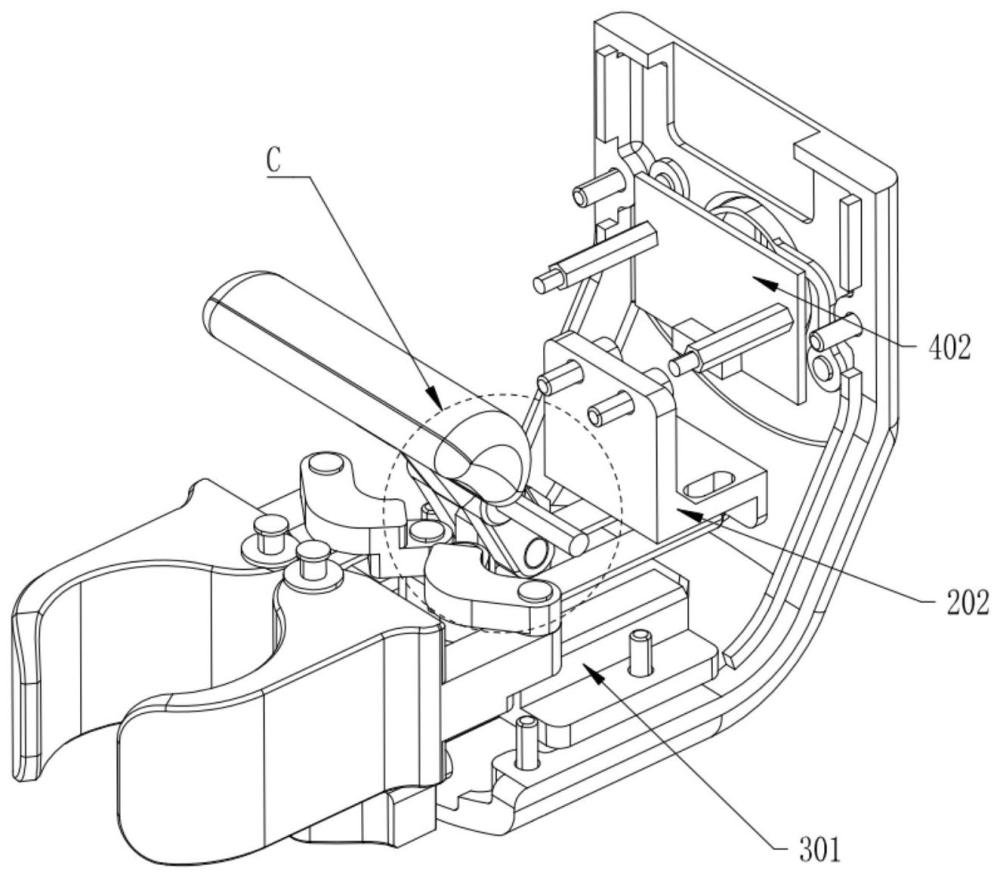
3、優選的,所述活動組件設置為曲柄滑座機構,所述曲柄滑座機構包括:一對曲柄組件以及連接于所述一對曲柄組件末端的一對夾爪,所述一對曲柄組件具有死點位置,所述一對夾爪用于對接所述套管,當所述一對夾爪夾緊所述套管時,所述一對曲柄組件越過所述死點位置保持自鎖。
4、優選的,所述一對曲柄組件包括:兩個曲柄本體和位于所述曲柄本體前后端的四個轉軸,形成類似“m”的對稱形狀,其中所述“m”外側的兩個所述轉軸與所述一對夾爪相連,所述死點位置為:與一對夾爪相連的兩個所述轉軸形成的連線和另外兩個所述轉軸形成的連線位于一條直線上的位置。
5、優選的,所述曲柄滑座機構還包括:撥扭、活動板和彈簧,所述撥扭的下端部可轉動地連接于所述活動板,所述活動板一端連接所述一對曲柄組件、另一端連接所述彈簧,所述撥扭的樞轉軸和所述彈簧均固定于所述上蓋,所述撥扭用于被推壓、轉動以驅動所述活動板向一個方向運動,所述彈簧用于驅動所述活動板向相反的方向運動。
6、優選的,所述彈簧的延伸方向與所述“m”外側的兩個所述轉軸的平移運動的方向相平行。
7、優選的,所述活動板上設有安裝部,所述安裝部用于安裝所述一對曲柄組件和所述彈簧,所述一對曲柄組件和所述彈簧的安裝方向是垂直的。
8、優選的,還包括:固定板,所述固定板固定于所述下蓋,所述固定板和所述活動板中一者設有導槽,另一者設有與所述導槽相適應的導軌,以實現所述活動板與所述固定板的滑動配合。
9、優選的,所述撥扭的下端部設有動轉軸,所述活動板上設有垂直于板體的分叉柱,在所述分叉柱中形成有限位滑槽,所述動轉軸容納于所述限位滑槽且可相對于所述限位滑槽轉動和上下移動。
10、優選的,所述撥扭以所述樞轉軸為支點形成杠桿結構,所述撥扭的上端部與所述樞轉軸之間的力臂大于所述動轉軸與所述樞轉軸之間的力臂2倍以上。
11、優選的,所述動轉軸套設有滑套,所述撥扭被推壓、轉動時,所述滑套與所述限位滑槽相對滾動。
12、優選的,所述一對夾爪為對稱結構,分別具有支臂和連接于所述支臂末端的夾鉗,所述支臂上設有第一軸孔以與所述曲柄組件相連,所述夾鉗上設有第二軸孔以與所述上蓋相連,且兩個所述夾鉗相對的內側面可合圍形成一個圓形。
13、優選的,還包括端口離合按鈕和微動開關,所述端口離合按鈕設置于所述下蓋的側面用以控制所述機械臂的解鎖或鎖定,所述微動開關設置于所述端口離合按鈕下方的對應位置且通過支腳固定于所述上蓋。
14、優選的,還包括傳感器,所述傳感器設置于該套管適配器的底部且與所述套管的安裝位置相對應的位置,所述傳感器用于檢測所述套管是否存在。
15、本申請的目的之二是提供一種患者手術平臺,包括:包括底座、立柱、吊桿、旋轉盤和機械臂,所述機械臂的末端下側安裝有如上述任一項所述的套管適配器。
16、本申請的目的之三是提供一種手術機器人,包括:醫生控制臺、圖像平臺,還包括如上所述的患者手術平臺。
17、相較于現有技術,本申請至少具有以下技術效果:
18、通過曲柄滑座機構來實現夾爪的開合,將以前凸輪的滑動摩擦變為了現在滑套的滾動摩擦,減小了摩擦力,提高了套管適配器的使用壽命。
19、利用曲柄滑座機構存在死點的特性實現夾爪自鎖,配合拉伸方向與作用到夾爪上的力方向一致的拉簧,進一步提高夾持的穩定性,使穿刺套管能夠被穩定可靠的固定,且可減小空間占用或降低彈簧選型成本。
20、套管沒有附接部分,整體重量較輕且重心位于套管細長軸的中心線上,使用感受感受更佳;而且夾爪相比于以前的尖端和凹陷,對于加工精度的要求低,也能降低制造成本。
技術特征:
1.一種套管適配器,其特征在于,包括:活動組件、相互配合的上蓋和下蓋、以及位于上蓋頂端的接口,所述活動組件用于對接套管以實現所述套管的夾緊與松開,所述上蓋和所述下蓋用于承載所述活動組件和所述接口,所述接口用于將該套管適配器安裝于機械臂。
2.根據權利要求1所述的套管適配器,其特征在于,所述活動組件設置為曲柄滑座機構,所述曲柄滑座機構包括:一對曲柄組件以及連接于所述一對曲柄組件末端的一對夾爪,所述一對曲柄組件具有死點位置,所述一對夾爪用于對接所述套管,當所述一對夾爪夾緊所述套管時,所述一對曲柄組件越過所述死點位置保持自鎖。
3.根據權利要求2所述的套管適配器,其特征在于,所述一對曲柄組件包括:兩個曲柄本體和位于所述曲柄本體前后端的四個轉軸,形成類似“m”的對稱形狀,其中所述“m”外側的兩個所述轉軸與所述一對夾爪相連,所述死點位置為:與一對夾爪相連的兩個所述轉軸形成的連線和另外兩個所述轉軸形成的連線位于一條直線上的位置。
4.根據權利要求2所述的套管適配器,其特征在于,所述曲柄滑座機構還包括:撥扭、活動板和彈簧,所述撥扭的下端部可轉動地連接于所述活動板,所述活動板一端連接所述一對曲柄組件、另一端連接所述彈簧,所述撥扭的樞轉軸和所述彈簧均固定于所述上蓋,所述撥扭用于被推壓、轉動以驅動所述活動板向一個方向運動,所述彈簧用于驅動所述活動板向相反的方向運動。
5.根據權利要求4所述的套管適配器,其特征在于,所述彈簧的延伸方向與所述“m”外側的兩個所述轉軸的平移運動的方向相平行。
6.根據權利要求4所述的套管適配器,其特征在于,所述活動板上設有安裝部,所述安裝部用于安裝所述一對曲柄組件和所述彈簧,所述一對曲柄組件和所述彈簧的安裝方向是垂直的。
7.根據權利要求4至6任一項所述的套管適配器,其特征在于,還包括:固定板,所述固定板固定于所述下蓋,所述固定板和所述活動板中一者設有導槽,另一者設有與所述導槽相適應的導軌,以實現所述活動板與所述固定板的滑動配合。
8.根據權利要求4至6任一項所述的套管適配器,其特征在于,所述撥扭的下端部設有動轉軸,所述活動板上設有垂直于板體的分叉柱,在所述分叉柱中形成有限位滑槽,所述動轉軸容納于所述限位滑槽且可相對于所述限位滑槽轉動和上下移動。
9.根據權利要求8所述的套管適配器,其特征在于,所述撥扭以所述樞轉軸為支點形成杠桿結構,所述撥扭的上端部與所述樞轉軸之間的力臂大于所述動轉軸與所述樞轉軸之間的力臂2倍以上。
10.根據權利要求8所述的套管適配器,其特征在于,所述動轉軸套設有滑套,所述撥扭被推壓、轉動時,所述滑套與所述限位滑槽相對滾動。
11.根據權利要求2或3所述的套管適配器,其特征在于,所述一對夾爪為對稱結構,分別具有支臂和連接于所述支臂末端的夾鉗,所述支臂上設有第一軸孔以與所述曲柄組件相連,所述夾鉗上設有第二軸孔以與所述上蓋相連,且兩個所述夾鉗相對的內側面可合圍形成一個圓形。
12.根據權利要求2至6任一項所述的套管適配器,其特征在于,還包括端口離合按鈕和微動開關,所述端口離合按鈕設置于所述下蓋的側面用以控制所述機械臂的解鎖或鎖定,所述微動開關設置于所述端口離合按鈕下方的對應位置且通過支腳固定于所述上蓋。
13.根據權利要求2至6任一項所述的套管適配器,其特征在于,還包括傳感器,所述傳感器設置于該套管適配器的底部且與所述套管的安裝位置相對應的位置,所述傳感器用于檢測所述套管是否存在。
14.一種患者手術平臺,包括底座、立柱、吊桿、旋轉盤和機械臂,其特征在于,所述機械臂的末端下側安裝有如權利要求1至13任一項所述的套管適配器。
15.一種手術機器人,包括醫生控制臺、圖像平臺,其特征在于,還包括如權利要求14所述的患者手術平臺。
技術總結
本申請涉及醫療器械領域,尤其涉及一種套管適配器、患者手術平臺及手術機器人。本申請的套管適配器,包括:活動組件、相互配合的上蓋和下蓋、以及位于上蓋頂端的接口,活動組件用于對接套管以實現套管的夾緊與松開,上蓋和下蓋用于承載活動組件和接口,接口用于將該套管適配器安裝于機械臂。具體的,活動組件設置為曲柄滑座機構,利用滑座的移動推動曲柄的運動,從而使夾爪夾緊套管,在夾爪夾緊套管時,該曲柄越過死點位置保持自鎖。本申請可以實現套管的快速安裝或拆卸,且具有自鎖功能,夾持牢固、穩定,而且使用體驗舒適、使用壽命長。
技術研發人員:李揚,彭程,徐敏
受保護的技術使用者:敏捷醫療科技(蘇州)有限公司
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!