一種基于人工智能交互的旅游導航系統
本發明屬于導航,具體涉及一種基于人工智能交互的旅游導航系統。
背景技術:
1、隨著經濟的發展人們越來越富裕,通過旅游進行休閑放松,但是對于景區內部復雜的線路進行導航時,傳統的地圖導航技術不能滿足游客的需求,具體是因為:傳統地圖匹配技術一直以來被廣泛應用在智能交通系統中,結合定位信息和路網信息,確定車輛行駛在對應的道路上及在道路上的位置;當前主要匹配算法多是面向城市道路上的車輛,對于景區導航服務中使用移動終端定位的行人來說并不合適,尤其是對于山地景區,主要表現在定位環境復雜、定位設備精度低及用戶運動無規律等,傳統智能交通系統上的地圖匹配技術不能滿足游客的需求,為此我們提出一種基于人工智能交互的旅游導航系統。
技術實現思路
1、本發明的目的是提供一種基于人工智能交互的旅游導航系統,首先搭建景區的初始三維模型,然后進一步搭建景區的實景ar模型,使用實景ar模型搭建具有實景導航、實景漫游以及景點交互的基于增強顯示(ar)的ar導航系統,游客獲取ar導航系統后,并使用ar導航系統在景區內進行實景交互式導航,大大提高游客與景區的交互性,以及為游客提供更加便捷的景區導航服務。
2、本發明采取的技術方案具體如下:
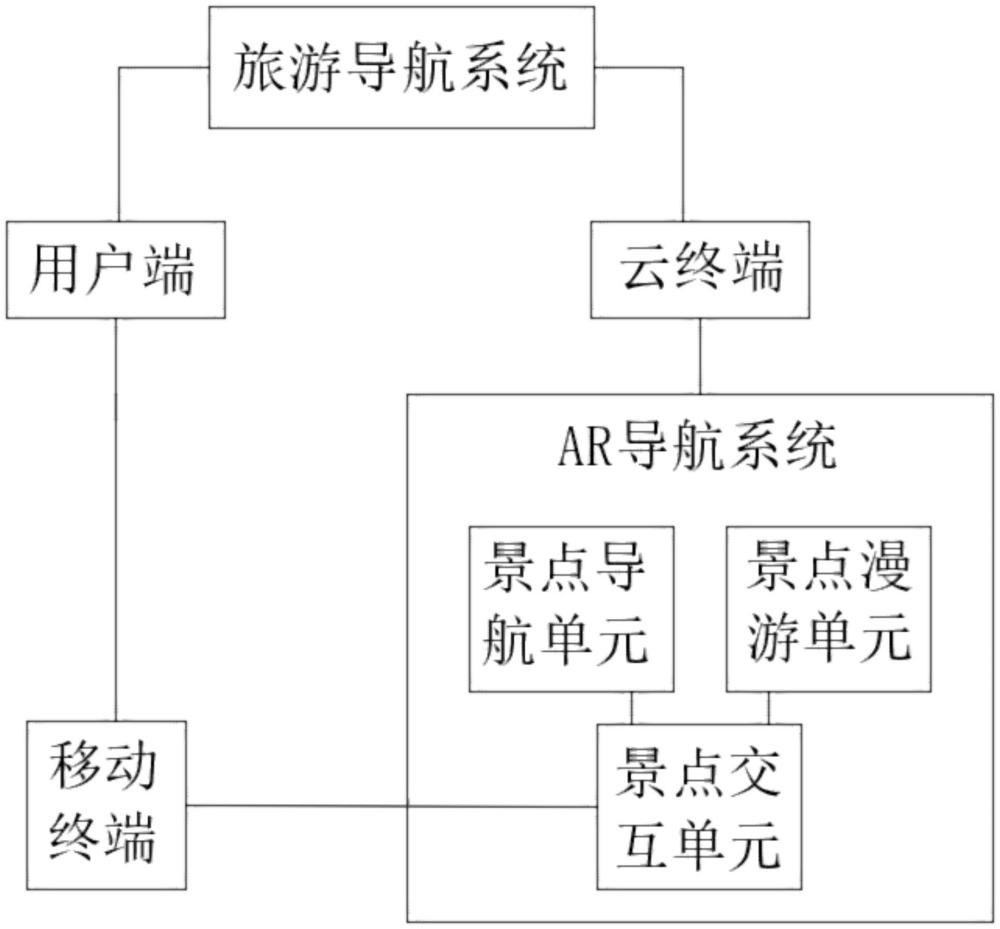
3、一種基于人工智能交互的旅游導航系統,包括:云終端以及用戶端;所述云終端包括三維實景搭建模塊以及三維地圖交互模塊;
4、所述三維實景搭建模塊用于搭建景區的實景三維ar模型;所述三維地圖交互模塊對所述實景三維ar模型進行碰撞檢測以及模型渲染,所述三維地圖交互模塊同時完成交互功能設計,并把所述實景三維ar模型映射到物理跟蹤的真實場景中,得到ar導航系統;
5、所述用戶端在景區內部通過所述ar導航系統完成實景導航。
6、優選地,所述三維實景搭建模塊用于搭建景區的實景三維ar模型具體過程如下:
7、步驟101:首先針對景區場景劃分網格區域,根據網格區域設計無人機航線和航高以及進行像控點的布設;
8、步驟102:使用無人機搭載攝像機按照航線以及像控點進行初始圖像數據采集;
9、步驟103:對初始圖像數據進行預處理,對預處理的初始圖像數據進行數據質量檢查以及匹配;
10、步驟104:通過空中三角測量為缺少野外控制點的地區測圖提供絕對定向的控制點;
11、步驟105:對空中三角測量解算出的數據根據實際場景范圍進行模型重建,并生成所述初始三維模型。
12、優選地,所述步驟103中,通過完成對初始圖像進行統一調色,完成數據預處理。
13、優選地,在得到所述初始三維模型后,通過人工手持三維掃描儀沿著景區全部路線進行三維精細化采集,得到三維細節數據,并將所述三維細節數據補充至所述初始三維模型,經過融合得到所述實景三維ar模型。
14、優選地,所述ar導航系統包括景點導航單元,所述用戶端使用智能移動終端在進入景區之前先獲取ar導航系統,然后選擇景點目的地,所述景點導航單元完成路徑規劃,所述用戶端確定路徑后,所述景點導航單元生成導航結果。
15、優選地,所述景點導航單元完成路徑規劃過程中,首先所述景點導航單元獲取用戶端使用的智能移動終端的定位信號,然后在所述智能移動終端在現實世界中移動時,所述景點導航單元通過并行測距與映射的過程來獲取智能移動終端相對于周圍世界的位置;所述景點導航單元會檢測捕獲的攝像頭圖像中的視覺差異特征點,并使用視覺差異特征點來計算其位置變化;移動終端設備imu的慣性測量結果和視覺信息相結合,共同用于估計攝像頭隨著時間推移而相對于周圍世界的姿態,完成導航。
16、優選地,所述景點導航單元還用于設置距離提示閾值β,在所述景點導航單元進行實景導航過程中,在距離變道節點βm時,所述景點導航單元發出提醒,提醒用戶端根據移動終端的攝像機拍攝場景影像進行實景導航。
17、優選地,所述ar導航系統還包括景點漫游單元,用戶端直接通過所述ar導航系統的景點漫游單元完成虛擬漫游以及人工智能交互。
18、優選地,所述ar導航系統還包括景點交互單元,所述景點交互單元在用戶端進行實景導航以及虛擬漫游時對所述實景三維ar模型中的景點進行內容介紹以及交互問答。
19、優選地,所述云終端還包括登錄模塊,用戶端通過身份信息注冊,注冊完成后通過身份信息登錄所述云終端并獲取所述ar導航系統。
20、本發明取得的技術效果為:
21、本發明中,首先通過無人機攜帶攝像機獲取景區場景的初始三維模型,在得到初始三維模型后,通過人工手持三維掃描儀沿著景區全部路線進行三維精細化采集,得到三維細節數據,并將三維細節數據補充至初始三維模型,經過融合得到實景三維ar模型,使得最終得到的實景三維ar模型,使得景區實景三維ar模型更加精確,不僅僅能夠用于ar導航系統還能夠應用于景區智能化管理,為景區管理以及運營提供較為精細的實景三維ar模型。
22、本發明中,通過基于實景三維ar模型后,將實景三維ar模型導入unity3d;進行漫游搭建以及人工智能交互漫游開發,利用unity3d渲染技術及碰撞檢測功能,實現增強現實導覽系統中需要對3d虛擬場景進行渲染、交互功能,并把虛擬物體映射到相應跟蹤的真實場景中;在使用easyar的運動跟蹤功能;最終得到具有景區導航功能、景點漫游功能以及景點交互的增強現實效果的ar導航系統,并將開發得到的ar導航系統輸出apk程序文件和ipa程序文件,并將apk程序文件以及ipa程序文件均存儲在云終端,并在景區入口處以及各個景點路牌處張貼兩個二維碼,游客通過掃描二維碼下載并安裝ar導航系統;使得作為游客的用戶端更加方便獲取ar導航系統,且本發明中通過搭建ar導航系統具有實景導航、實景漫游以及景點交互的基于增強顯示(ar)的ar導航系統,游客獲取ar導航系統后,并使用ar導航系統在景區內進行實景交互式導航,大大提高游客與景區的交互性,以及為游客提供更加便捷的景區導航服務。
23、本發明在導航過程中,用戶端在ar導航系統內輸入景點目的地后,景點導航單元開始進行路徑規劃,具體的首先獲取用戶位置數據,具體的首先景點導航單元獲取用戶端使用的智能移動終端的定位信號,然后通過手機攝像頭獲取當前朝向以及景色影像,然后,景點導航單元通過并行測距與映射的過程來獲取智能移動終端相對于周圍世界的位置;景點導航單元會檢測捕獲的攝像頭圖像中的視覺差異特征點,并使用視覺差異特征點來計算其位置變化;移動終端設備imu的慣性測量結果和視覺信息相結合,共同用于估計攝像頭隨著時間推移而相對于周圍世界的姿態,最終確定用戶位于景區中的位置以及用戶當前朝向姿態,然后進行路徑規劃,使得獲取的作為用戶端的游客的位置以及姿態更加精確。
24、本發明在導航過程中,在路徑規劃過程中,ar導航系統首先給出路程較近的最優路線,然后用戶端進行選擇,或者用戶端自行選擇需要途徑的景點完成用戶自行規劃路線,路線規劃完成后,會在攝像頭拍攝的實景影像中出現指路箭頭,例如,當需要向前走時,支路箭頭沿著當前道路指向前,當需要掉頭時,會在手機拍攝的實景影像中出現掉頭的指路箭頭,目前,對于方向感較差的游客,尤其在道路復雜的景區內,更加不方便找出正確的方向,而現有道路交通用導航,每次開導航前需要先區分方向,然后才能按照正確導航指引行走,但是本實施例中,不再需要用戶結合導航區分方向,直接在拍攝的實景影像中出現指路箭頭,只需要沿著指路箭頭行走,避免走錯;又例如當前道路節點可以右拐、可以直行、也可以沿著右前方上臺階,則對應的實景導航,根據目的地景點的不同,景點導航單元可以在手機拍攝的實景影像中出現右拐的指路箭頭、直行的指路箭頭或者右前方沿著臺階向上的指路箭頭,因為是實景導航,避免游客走錯,大大提高導航效果;
25、本發明在實景導航過程中,通過設置景點交互單元,該景點交互單元如同導游,提前錄入景點介紹的音影內容,當游客游覽景點時,通過手機攝像頭拍攝景點后,例如,當游客使用手機拍攝一棵古樹,用戶通過手機選擇景物介紹,則手機開始播放古樹介紹視頻以及古樹的三維實景模型,提高游客在旅游過程中的交互性;
26、本發明中,ar導航系統還包括景點漫游單元,游客獲取ar導航系統后,直接通過移動終端或者專業vr漫游設備進行虛擬現實漫游,當游客不親身至景區時,也能通過該ar導航系統完成實景漫游,使得基于人工智能交互,用戶完成身臨其境的實景漫游,同樣能夠欣賞景區景色;例如,當用戶使用ar導航系統的景點漫游單元進行景點漫游時,當用戶漫游至古樹景點處,用戶選擇景物介紹,則手機開始播放古樹介紹視頻以及古樹的三維實景模型,提高景點漫游的交互性。
- 還沒有人留言評論。精彩留言會獲得點贊!