一種小型無人駕駛自動行走式蔬菜移栽機
本發明涉及蔬菜移栽的,尤其涉及一種小型無人駕駛自動行走式蔬菜移栽機。
背景技術:
1、蔬菜移栽是蔬菜種植過程中的一項重要技術,主要目的是為了提高蔬菜的成活率和產量,移栽一般是在蔬菜苗長到一定大小時進行,通常是在溫室或育苗盤中培育出健壯的幼苗后,再將它們移植到田間中繼續生長。
2、傳統的蔬菜移栽方式通常是由人工在土壤中挖好坑洞,然后手動將蔬菜苗放入坑中,再將土壤壓實,這種移栽方式的人工成本較高,且操作麻煩,移栽效率較低;目前市面上也出現了較多的蔬菜移栽機產品,但是這類產品在使用時,依然需要人工將各個蔬菜苗依次放入喂苗裝置中,通過喂苗裝置將蔬菜苗種植到土壤中,依然存在較高的人工成本,自動化程度不高。
技術實現思路
1、有鑒于此,本發明提供一種小型無人駕駛自動行走式蔬菜移栽機,能克服現有的蔬菜移栽機在使用時,依然需要人工將各個蔬菜苗依次放入喂苗裝置中,依然存在較高的人工成本,自動化程度不高的缺點。
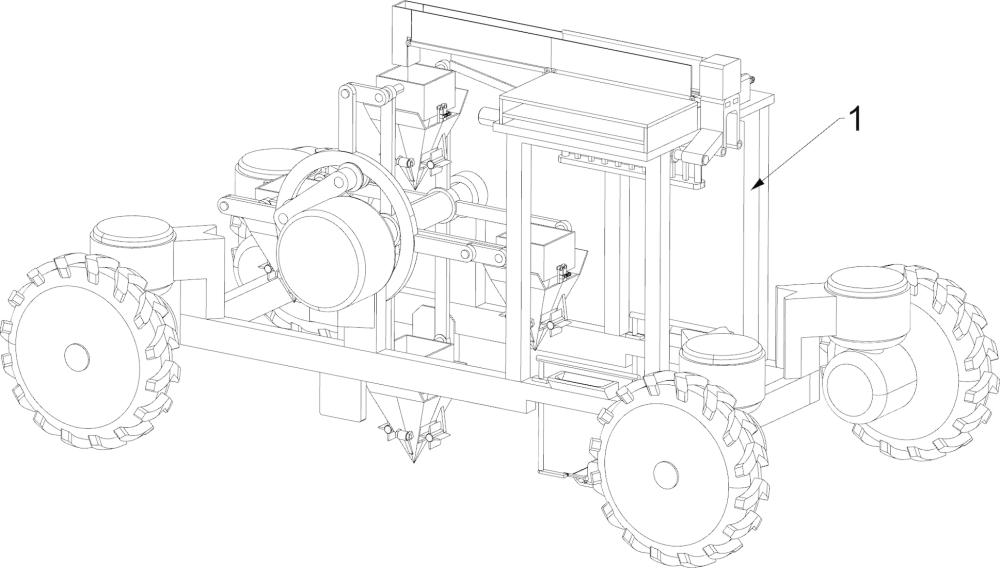
2、本發明的技術實施方案為:一種小型無人駕駛自動行走式蔬菜移栽機,包括有安裝臺、輸送機ⅰ、限位卡板、支撐框、滑動頂架、電動推桿ⅰ、滑動架、電動推桿ⅱ、連接板、支撐架、擋板、輸送機ⅱ、輸送機ⅲ、導向框、移動組件和栽種機構,安裝臺上均勻間隔開有圓孔,輸送機ⅰ對稱安裝于安裝臺頂面,限位卡板對稱連接于安裝臺頂面,支撐框固定連接于安裝臺頂面,滑動頂架滑動連接于圓孔內,電動推桿ⅰ連接于安裝臺上,且滑動頂架與電動推桿ⅰ的伸縮桿連接,滑動架滑動連接于安裝臺上,電動推桿ⅱ連接于安裝臺上,且滑動架與電動推桿ⅱ的伸縮桿連接,連接板對稱連接于滑動架上,支撐架連接于安裝臺側面,擋板分別連接于連接板頂面和支撐架頂面,輸送機ⅱ安裝于連接板上,輸送機ⅲ安裝于支撐架上,導向框連接于支撐架上,移動組件用于驅動安裝臺進行移動,栽種機構用于將蔬菜苗栽種于土壤中。
3、更為優選的是,移動組件包括有車架、轉向電機、驅動電機ⅰ和移動輪,安裝臺底面與車架頂面連接,轉向電機對稱連接于車架上,驅動電機ⅰ連接于轉向電機的輸出軸上,移動輪連接于驅動電機ⅰ的輸出軸上。
4、更為優選的是,栽種機構包括有支撐桿、轉動軸、驅動電機ⅱ、十字架、轉動框、錐形框、連接彈簧、穩定組件和開合組件,支撐桿對稱連接于車架頂面,轉動軸轉動連接于支撐桿上,驅動電機ⅱ連接于其中一個支撐桿上,且轉動軸端部與驅動電機ⅱ的輸出軸連接,十字架對稱連接于轉動軸上,轉動框間隔轉動連接于十字架上,轉動框上均轉動連接有兩個錐形框,兩個錐形框之間連接有連接彈簧,穩定組件用于穩定轉動框的位置,開合組件用于控制錐形框的轉動開合。
5、更為優選的是,開合組件包括有接觸板、安裝板和擠壓輪,接觸板連接于錐形框頂面,安裝板對稱連接于車架底面,擠壓輪轉動連接于安裝板上。
6、更為優選的是,穩定組件包括有固定架、導輪、轉動環、固定桿和連桿,固定架連接于其中一個支撐桿側面,導輪間隔轉動連接于固定架上,轉動環套在導輪上,固定桿間隔連接于轉動環上,連桿轉動連接于固定桿上,且連桿與轉動框的旋轉軸固定連接。
7、更為優選的是,還包括有氣泵和分流管,氣泵連接于滑動架頂面,分流管連接于氣泵的出氣口處。
8、更為優選的是,還包括有支撐板、無刷電機ⅰ和撥動輪,支撐板對稱連接于錐形框兩側,無刷電機ⅰ安裝于支撐板上,撥動輪安裝于無刷電機ⅰ上,錐形框上對稱開有方孔。
9、更為優選的是,還包括有支撐塊、無刷電機ⅱ和撥桿,支撐塊對稱連接于錐形框側面,無刷電機ⅱ安裝于支撐塊上,撥桿安裝于無刷電機ⅱ上,且撥桿轉動貫穿錐形框側面。
10、更為優選的是,還包括有升降架、收納盒、擺動桿、壓實板和振動電機,升降架對稱滑動連接于車架上,收納盒對稱連接于車架頂面,擺動桿對稱轉動連接于升降架上,壓實板轉動連接于擺動桿端部,振動電機安裝于壓實板頂面。
11、與現有技術相比,本發明具有如下優點:1、本發明通過滑動頂架上升能將育苗盤內的一排蔬菜苗往上頂出,然后通過輸送機ⅱ和輸送機ⅲ能將蔬菜苗依次輸送至栽種機構內,以將蔬菜苗自動移栽到土壤中,無需人工對蔬菜苗進行依次送苗,省時省力,降低人工成本。
12、2、本發明通過無刷電機ⅰ驅動撥動輪轉動,能將蔬菜苗左右兩側的土壤撥動至蔬菜苗下端的土壤塊上,從而能在蔬菜苗掉入坑洞內時,通過土壤壓住蔬菜苗下端,隨后振動電機能驅動壓實板上下往復振動,以將坑洞上的土壤壓實,從而能防止蔬菜苗發生傾倒。
13、3、本發明通過控制四組錐形框進行圓周轉動,能在該蔬菜移栽機的移動過程中,使四組錐形框依次循環對蔬菜苗進行自動接取,并能自動將各個蔬菜苗沿該蔬菜移栽機的移動路徑進行間隔種植,保證相鄰兩個蔬菜苗之間的間距一致,且能保證錐形框對蔬菜苗進行接取和種植的穩定性,同時,通過控制錐形框的轉速即可調整相鄰兩個蔬菜苗之間的間距。
技術特征:
1.一種小型無人駕駛自動行走式蔬菜移栽機,其特征是,包括有安裝臺(1)、輸送機ⅰ(2)、限位卡板(3)、支撐框(4)、滑動頂架(5)、電動推桿ⅰ(6)、滑動架(7)、電動推桿ⅱ(8)、連接板(9)、支撐架(10)、擋板(11)、輸送機ⅱ(12)、輸送機ⅲ(121)、導向框(13)、移動組件和栽種機構,安裝臺(1)上均勻間隔開有圓孔(101),輸送機ⅰ(2)對稱安裝于安裝臺(1)頂面,限位卡板(3)對稱連接于安裝臺(1)頂面,支撐框(4)固定連接于安裝臺(1)頂面,滑動頂架(5)滑動連接于圓孔(101)內,電動推桿ⅰ(6)連接于安裝臺(1)上,且滑動頂架(5)與電動推桿ⅰ(6)的伸縮桿連接,滑動架(7)滑動連接于安裝臺(1)上,電動推桿ⅱ(8)連接于安裝臺(1)上,且滑動架(7)與電動推桿ⅱ(8)的伸縮桿連接,連接板(9)對稱連接于滑動架(7)上,支撐架(10)連接于安裝臺(1)側面,擋板(11)分別連接于連接板(9)頂面和支撐架(10)頂面,輸送機ⅱ(12)安裝于連接板(9)上,輸送機ⅲ(121)安裝于支撐架(10)上,導向框(13)連接于支撐架(10)上,移動組件用于驅動安裝臺(1)進行移動,栽種機構用于將蔬菜苗栽種于土壤中。
2.按照權利要求1所述的一種小型無人駕駛自動行走式蔬菜移栽機,其特征是,移動組件包括有車架(14)、轉向電機(15)、驅動電機ⅰ(16)和移動輪(17),安裝臺(1)底面與車架(14)頂面連接,轉向電機(15)對稱連接于車架(14)上,驅動電機ⅰ(16)連接于轉向電機(15)的輸出軸上,移動輪(17)連接于驅動電機ⅰ(16)的輸出軸上。
3.按照權利要求2所述的一種小型無人駕駛自動行走式蔬菜移栽機,其特征是,栽種機構包括有支撐桿(18)、轉動軸(19)、驅動電機ⅱ(20)、十字架(21)、轉動框(22)、錐形框(23)、連接彈簧(24)、穩定組件和開合組件,支撐桿(18)對稱連接于車架(14)頂面,轉動軸(19)轉動連接于支撐桿(18)上,驅動電機ⅱ(20)連接于其中一個支撐桿(18)上,且轉動軸(19)端部與驅動電機ⅱ(20)的輸出軸連接,十字架(21)對稱連接于轉動軸(19)上,轉動框(22)間隔轉動連接于十字架(21)上,轉動框(22)上均轉動連接有兩個錐形框(23),兩個錐形框(23)之間連接有連接彈簧(24),穩定組件用于穩定轉動框(22)的位置,開合組件用于控制錐形框(23)的轉動開合。
4.按照權利要求3所述的一種小型無人駕駛自動行走式蔬菜移栽機,其特征是,開合組件包括有接觸板(25)、安裝板(26)和擠壓輪(27),接觸板(25)連接于錐形框(23)頂面,安裝板(26)對稱連接于車架(14)底面,擠壓輪(27)轉動連接于安裝板(26)上。
5.按照權利要求4所述的一種小型無人駕駛自動行走式蔬菜移栽機,其特征是,穩定組件包括有固定架(28)、導輪(29)、轉動環(30)、固定桿(31)和連桿(32),固定架(28)連接于其中一個支撐桿(18)側面,導輪(29)間隔轉動連接于固定架(28)上,轉動環(30)套在導輪(29)上,固定桿(31)間隔連接于轉動環(30)上,連桿(32)轉動連接于固定桿(31)上,且連桿(32)與轉動框(22)的旋轉軸固定連接。
6.按照權利要求5所述的一種小型無人駕駛自動行走式蔬菜移栽機,其特征是,還包括有氣泵(33)和分流管(34),氣泵(33)連接于滑動架(7)頂面,分流管(34)連接于氣泵(33)的出氣口處。
7.按照權利要求6所述的一種小型無人駕駛自動行走式蔬菜移栽機,其特征是,還包括有支撐板(44)、無刷電機ⅰ(45)和撥動輪(46),支撐板(44)對稱連接于錐形框(23)兩側,無刷電機ⅰ(45)安裝于支撐板(44)上,撥動輪(46)安裝于無刷電機ⅰ(45)上,錐形框(23)上對稱開有方孔(47)。
8.按照權利要求7所述的一種小型無人駕駛自動行走式蔬菜移栽機,其特征是,還包括有支撐塊(48)、無刷電機ⅱ(49)和撥桿(50),支撐塊(48)對稱連接于錐形框(23)側面,無刷電機ⅱ(49)安裝于支撐塊(48)上,撥桿(50)安裝于無刷電機ⅱ(49)上,且撥桿(50)轉動貫穿錐形框(23)側面。
9.按照權利要求8所述的一種小型無人駕駛自動行走式蔬菜移栽機,其特征是,還包括有升降架(51)、收納盒(52)、擺動桿(53)、壓實板(54)和振動電機(55),升降架(51)對稱滑動連接于車架(14)上,收納盒(52)對稱連接于車架(14)頂面,擺動桿(53)對稱轉動連接于升降架(51)上,壓實板(54)轉動連接于擺動桿(53)端部,振動電機(55)安裝于壓實板(54)頂面。
技術總結
本發明涉及蔬菜移栽的技術領域,尤其涉及一種小型無人駕駛自動行走式蔬菜移栽機。包括有安裝臺、輸送機Ⅰ、限位卡板、支撐框、滑動頂架、電動推桿Ⅰ、滑動架等,安裝臺上均勻間隔開有圓孔,輸送機Ⅰ對稱安裝于安裝臺頂面,限位卡板對稱連接于安裝臺頂面,支撐框固定連接于安裝臺頂面,滑動頂架滑動連接于圓孔內,電動推桿Ⅰ連接于安裝臺上,且滑動頂架與電動推桿Ⅰ的伸縮桿連接,滑動架滑動連接于安裝臺上。本發明通過滑動頂架上升能將育苗盤內的一排蔬菜苗往上頂出,然后通過輸送機Ⅱ和輸送機Ⅲ能將蔬菜苗依次輸送至栽種機構內,以將蔬菜苗自動移栽到土壤中,無需人工對蔬菜苗進行依次送苗,省時省力,降低人工成本。
技術研發人員:朱繁瀧,劉大明,丁接榮,陳坤,劉輝,王啟鵬,戴俊偉
受保護的技術使用者:贛州職業技術學院
技術研發日:
技術公布日:2024/10/21
- 還沒有人留言評論。精彩留言會獲得點贊!