電池驅動的割草機的制作方法
背景技術:
技術實現思路
1、電子割草機、特別是電池驅動的割草機(battery?powered?lawnmower)正變得越來越普遍地被房主和商業景觀設計師使用。對于燃油驅動的割草機和電動割草機兩者來說,安全性是問題,并且可以使用提環桿來確保當提環桿沒有被用戶抓住時,刀片和/或驅動馬達不允許旋轉。通常,機械聯動機構用于將提環桿聯接到原動機。然而,電動割草機通常沒有燃料切斷或其他機械機構來允許提環桿停止割草機的操作。相應地,電子系統可能有利于與電子割草機一起使用。
2、本文描述的實施例涉及用于監測電池驅動的割草機的提環控制桿的位置的系統。
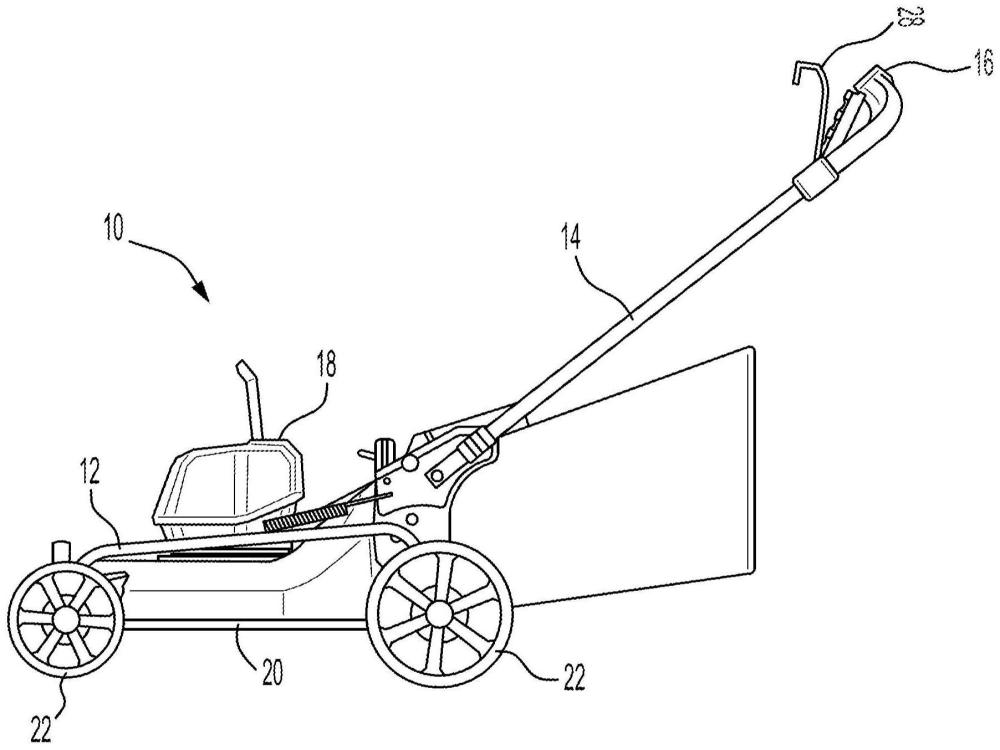
3、本文描述的電池驅動的割草機包括:刀片馬達,該刀片馬達聯接到至少一個刀片;用戶輸入裝置,該用戶輸入裝置被配置成接收刀片馬達控制信號;提環控制桿;以及位置傳感器。位置傳感器被配置成確定提環控制桿的位置。割草機還包括控制器,該控制器聯接到位置傳感器并且被配置成控制刀片馬達的操作。控制器被配置成:接收刀片馬達控制命令,基于位置傳感器提供的數據來確定提環控制桿的位置,并且響應于確定提環控制桿處于關閉位置,基于所接收的刀片馬達控制命令來控制刀片馬達。
4、在一個方面,位置傳感器是霍爾效應傳感器組件,該霍爾效應傳感器組件包括霍爾效應傳感器和磁體。
5、在另一方面,提環控制桿經由聯動機構聯接到電池驅動的割草機的手柄組件,并且磁體聯接到聯動機構。磁體還被配置成響應于提環控制桿在關閉位置和打開位置中的一者之間移動而相對于霍爾效應傳感器旋轉。
6、在另一方面,磁體被配置成在提環控制桿處于關閉位置的情況下最靠近霍爾效應傳感器定位。
7、在另一方面,割草機進一步包括手柄,該手柄具有凹進部分,該凹進部分被配置成在提環控制桿處于關閉位置的情況下接納提環控制桿。
8、在另一方面,割草機進一步包括多個輪子和驅動馬達,該驅動馬達聯接到這些輪子中的至少一個輪子并且被配置成使該至少一個輪子沿至少一個方向旋轉。
9、在另一方面,控制器還被配置成:接收驅動馬達控制命令,基于由位置傳感器提供的數據來確定提環控制桿的位置,并且響應于確定提環控制桿處于關閉位置,基于所接收的驅動馬達控制命令來控制驅動馬達。
10、在另一方面,控制器還被配置成:基于由位置傳感器提供的數據來檢測提環控制桿從關閉位置到打開位置的轉變,并且基于檢測到提環控制桿轉變到打開位置來停止刀片馬達的操作。
11、本文描述的操作電池驅動的割草機的方法包括:在電池驅動的割草機的控制器處接收來自一個或多個用戶接口的刀片馬達控制命令,并且由控制器基于由被配置成檢測提環控制桿的位置的位置傳感器提供的位置信號來確定提環控制桿的位置。這些方法還包括:經由控制器響應于確定提環控制桿處于關閉位置,基于所接收的刀片馬達控制命令來控制刀片馬達。
12、本文描述的電池驅動的割草機包括:刀片馬達,該刀片馬達聯接到至少一個刀片;用戶輸入裝置,該用戶輸入裝置被配置成接收刀片馬達控制信號;提環控制桿;以及手柄組件,該手柄組件包括手柄殼體和手柄。手柄包括凹進部分,該凹進部分被配置成在提環控制桿處于關閉位置的情況下接納提環控制桿。割草機進一步包括霍爾效應傳感器組件,該霍爾效應傳感器組件被配置成確定提環控制桿的位置。霍爾效應傳感器組件包括霍爾效應傳感器和磁體。割草機還包括控制器,該控制器聯接到位置傳感器并且被配置成控制刀片馬達的操作。控制器被配置成:接收刀片馬達控制命令,基于位置傳感器提供的數據來確定提環控制桿的位置,并且響應于確定提環控制桿處于關閉位置,基于所接收的刀片馬達控制命令來控制刀片馬達。
13、在詳細解釋任何實施例之前,應理解,實施例并不將其應用限制于以下描述中闡述的或在附圖中展示的部件配置和布置的細節。實施例能夠以各種方式來實踐或執行。此外要理解的是,本文使用的措辭和術語是出于說明的目的,而不應被視為是限制性的。“包括(including)”、“包括(comprising)”或“具有”及其變型的使用意指涵蓋其后列出的項及其等同物、以及附加項。除非另有說明或限制,否則寬泛地使用術語“安裝”、“連接”、“支撐”和“聯接”及其變型,并且這些術語涵蓋直接安裝、連接、支撐和聯接和間接安裝、連接、支撐和聯接這兩種情況。
14、另外,應當理解,實施例可以包括硬件、軟件和電子部件或模塊,出于討論的目的,這些電子部件或模塊可以被展示和描述為好像大多數部件僅在硬件中實施。然而,本領域的普通技術人員基于對這個詳細描述的閱讀將認識到,在至少一個實施例中,基于電子的方面可以在可由一個或多個處理單元(比如微處理器和/或專用集成電路(“asic”))執行的軟件(例如,存儲在非暫時性計算機可讀介質上)中實現。這樣,應當注意,可以利用多個基于硬件和軟件的裝置以及多個不同的結構部件來實現實施例。例如,說明書中描述的“服務器”、“計算裝置”、“控制器”、“處理器”等可以包括一個或多個處理單元、一個或多個計算機可讀介質模塊、一個或多個輸入/輸出接口、以及連接這些部件的各種連接件(例如,系統總線)。
15、與量或條件結合使用的相對術語,比如“約”、“大約”、“基本上”等,將被本領域普通技術人員理解為包括所述的值并且具有由上下文所規定的含義(例如,術語至少包括與測量準確度相關聯的誤差程度、與特定值相關聯的公差[例如,制造、組裝、使用等]等)。這種術語還應當被視為披露了由兩個端點的絕對值定義的范圍。例如,表述“從約2到約4”也披露了范圍“從2到4”。相對術語可以指所指示的值的正負百分比(例如,1%、5%、10%、或更多)。
16、應當理解,雖然某些附圖展示了位于特定裝置內的硬件和軟件,但是這些描繪僅出于說明的目的。本文中描述為由一個部件執行的功能可以由多個部件以分布式方式執行。同樣,由多個部件執行的功能可以由單一部件合并和執行。在一些實施例中,所展示的部件可以組合或劃分成單獨的軟件、固件和/或硬件。例如,邏輯和處理可以分布在多個電子處理器之間,而不是位于單一電子處理器內并由其執行。無論硬件部件和軟件部件如何組合或劃分,這些硬件部件和軟件部件都可以位于同一計算裝置上或者可以分布在通過一個或多個網絡或其他合適的通信鏈路連接的不同計算裝置之間。類似地,被描述為執行特定功能的部件也可以執行本文未描述的附加功能。例如,以某種方式“配置”的裝置或結構至少以該方式被配置,但是也可以以未明確列出的方式被配置。
技術特征:
1.一種電池驅動的割草機,其特征是,包括:
2.如權利要求1所述的電池驅動的割草機,其中,該位置傳感器是霍爾效應傳感器組件,該霍爾效應傳感器組件包括霍爾效應傳感器和磁體。
3.如權利要求2所述的電池驅動的割草機,其中,該提環控制桿經由聯動機構聯接到該電池驅動的割草機的手柄組件,并且
4.如權利要求3所述的電池驅動的割草機,其中,該磁體被配置成在該提環控制桿處于該關閉位置的情況下最靠近該霍爾效應傳感器定位。
5.如權利要求1所述的電池驅動的割草機,其中,進一步包括:
6.如權利要求1所述的電池驅動的割草機,其中,進一步包括:
7.如權利要求6所述的電池驅動的割草機,其中,該控制器進一步被配置成:
8.如權利要求1所述的電池驅動的割草機,其中,該控制器進一步被配置成:
9.一種電池驅動的割草機,其特征是,包括:
10.如權利要求9所述的電池驅動的割草機,其中,該提環控制桿經由聯動機構聯接到該手柄殼體,并且其中,該磁體聯接到該聯動機構并且被配置成響應于該提環控制桿在該關閉位置和打開位置中的一者之間移動而相對于該霍爾效應傳感器旋轉。
11.如權利要求10所述的電池驅動的割草機,其中,該磁體被配置成在該提環控制桿處于該關閉位置時最接近該霍爾效應傳感器定位。
12.?如權利要求9所述的電池驅動的割草機,其中,該控制器進一步被配置成:
技術總結
一種電池驅動的割草機,具有:刀片馬達,該刀片馬達聯接到至少一個刀片;用戶輸入裝置,該用戶輸入裝置被配置成接收刀片馬達控制信號;以及提環控制桿。提環控制桿聯接到位置傳感器,該位置傳感器被配置成確定提環控制桿的位置。電池驅動的割草機進一步包括控制器,該控制器聯接到位置傳感器并且被配置成控制刀片馬達的操作。控制器被配置成接收刀片馬達控制命令并且基于位置傳感器提供的數據來確定提環控制桿的位置。控制器進一步被配置成:響應于確定提環控制桿處于關閉位置,基于所接收的刀片馬達控制命令來控制刀片馬達。
技術研發人員:D·R·埃特爾,C·N·希勒,T·L·格雷厄姆,C·S·布靈頓
受保護的技術使用者:米沃奇電動工具公司
技術研發日:
技術公布日:2024/12/26
- 還沒有人留言評論。精彩留言會獲得點贊!